LernFFZ - Imitation learning for the transfer of human skills to industrial trucks
| Led by: | M. Sc. Mirko Schaper, M. Sc. Justus Lübbehusen |
| E-Mail: | mirko.schaper@ita.uni-hannover.de |
| Year: | 2023 |
| Funding: | BMWK |
| Duration: | 01.12.2023 - 30.11.2026 |
| Further information | justus.luebbehusen@ita.uni-hannover.de |
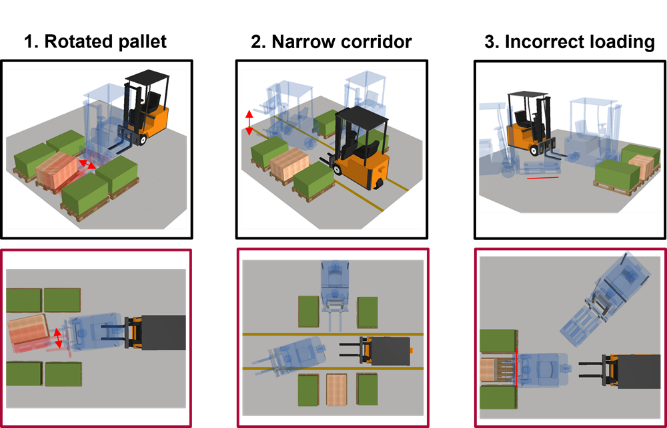
Although the automation of industrial trucks offers many advantages in intralogistics, companies often still rely on manually operated industrial trucks such as forklift trucks or pallet trucks due to their high flexibility and adaptability. Today, automated industrial trucks are able to transport load carriers independently in the internal logistics environment. However, automated load handling requires sufficiently precise and process-adapted positioning and alignment of the load carriers. Picking up hard-to-reach and complexly arranged load carriers presents challenges even for qualified drivers and requires experience in picking up loads. The objectives of the research project are therefore to initially record and formalise the implicit knowledge of experienced drivers during the driving task by means of information fusion of driving data recording and environment detection. A complex data set of real and synthetic driving data is created from the recorded data of the real vehicle, a digital twin and two test benches. Finally, suitable machine learning algorithms must be selected and adapted to the intralogistics problem. Approaches from supervised learning such as behavioural cloning, in which a model learns human behaviour directly from sample data in order to perform identical actions in a given environment, can be considered. Alternatively, methods from reinforcement and imitation learning can be combined to the inverse reinforcement learning. In this case, a reward function is first learnt from the recorded example data in order to subsequently learn a rule for the underlying driving task with the help of an agent. This allows the implicit goals of the expert to be modelled and simulated. The project is being carried out by the "Institute of Transport and Automation Technology" (ITA) at Leibniz Universität Hannover in cooperation with the "Institut für Integrierte Produktion Hannover gGmbH" (IPH), STILL GmbH and the software development company 3++.






















